News
The automated battery dismantling activities set out years ago with a concept idea and information about manual disassembly operations. But manual dismantling of end-of-life [EoL] electric vehicle [EV] batteries takes time, requires skilled labour and exposes workers to high voltage, residual energy and mechanical risks. To address these concerns, Watt4Ever [W4E] and University of Agder [UiA] proposed the automation solution. It solves challenges referring to efficiency and safety, but it also uncovers its limits when dealing with the high variability of battery pack designs. To handle this variation, the RHINOCEROS project is testing flexible, sensor–based robotic systems that can sort and dismantle different battery packs, even when there are uncertainties about their internal structure.
From this concept phase, it has gradually evolved, regularly reporting updates. It began from the development of a Disassembly Process Plan (DPP) supported by digital simulators and cognitive agents linked to a digital battery repository. This was followed by several rounds of engineering upgrades and the integration of these developments into a robotic dismantling system. The robots already moved into lab trials, under real-world settings. The automated dismantling operations were presented within our last newsletter.
The robotic system
The robotic system includes a set of features for automated sorting and dismantling of EoL EV batteries: two industrial robots, sensing, modified tools, control architecture, integrated execution and a process to compare its performance with manual dismantling operations. In these trials, the system is tested against two targets:
- it must sort the battery modules within a 120 minute window across different pack designs
- it must remove at least 75% of the pack to module connections on a minimum of five battery types
The robotic system is designed to work in close interaction with the cognitive agent and the database presented in the previous reporting. The cognitive agent determines the order of operations; the robotic system executes them. As it works, every action is logged and sent back to the digital repository, which helps refine the dismantling steps within the RHINOCEROS project.
What had to be rebuilt
Several tools needed mechanical and control upgrades once the lab tests started.
Unscrewing tool
Early tests showed that engaging the bit on screw heads was hampered when encountering misalignment problems. The tool now includes a screw‑retention feature and a controlled shift between search and high‑torque removal. It can run repeated cycles without losing position.
© University of Agder
Cable disconnection tool
The first prototype struggled with misaligned connectors. The refined version uses one actuator for two actions: releasing connectors or cutting cables when they cannot be unplugged. This simplification removes the need for manual tool changes and gives a predictable fallback option.
Module lifter
The first lifter did not cope well with modules supported only on one side. The redesigned version reinforces both side supports, reduces overhang and improves the pneumatic layout. It now combines top vacuum lifting with side clamping, which increases stability when handling modules with uneven heights.
Across the test batteries, the system has carried out 24 distinct actions, including removing covers, disconnecting cables, cutting brackets, lifting modules and switching tools.

© University of Agder
Tests confirm that 75% dismantling operations can be automated
The team compared manual dismantling times and steps with what the robots managed to complete. Results show that the system can now perform about 75% of the dismantling sequence without human intervention. The method used to measure groups actions into families: cover removal, structural parts, screws, cables, cutting, lifting and tool changes. This approach enables researchers to assess different battery designs on equal terms in the future.
Based on the validated operation sequences and time baselines, the automated disassembly system meets the KPI target of at least 75% automated disassembly time on the tested battery types evaluated so far. Final validation will be completed after the remaining test campaigns and integrated demonstrations before M48.
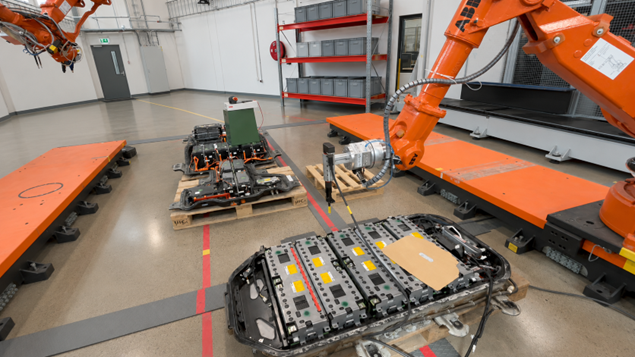
Dual-robot demonstration ready for testing in near-industrial environment
The demonstration operations will use UiA’s dual robot setup, where each robot, equipped with sensors to support contact-aware handling and safer execution on variable battery geometries, performs distinct sequences of the process.
The full cycle starts with high-quality photos of the battery pack. The robots then select the correct tool, remove screws, switch tools, lift the two modules detected by the camera and place them in the sorting bin. The tool changing station enables automatic switching between end-effectors so one robot can execute multiple dismantling tasks in one continuous sequence. In the RHINOCEROS process chain, it is the enabling operation between perception-guided targeting and tool-specific actions such as unscrewing, cable disconnection, and module lifting.
Drivers in ROS2 are ready and dismantling actions are already in place. The final validation campaign will run once the remaining two batteries arrive, with the results expected during the last project stage.
© Photos: University of Agder
The RHINOCEROS project has reached a turning point in its efforts to automate the dismantling of end-of-life [EoL] electric vehicle batteries. If in the previous communications, researchers at the Faculty of Engineering and Science within the University of Agder [UiA] were developing digital simulators and algorithms to plan disassembly sequences, this reporting brings updates about the validation of the robotic systems and the introduction of a cognitive agent for adaptive execution.
Researchers first developed a Disassembly Process Plan [DPP], where they optimised complex scheduling problems, such as planning time and tool allocation for dismantling operations. More recently, the UiA team commissioned a dual robot cell in ROS2 simulation, step which allows engineers to validate motion planning, tool changes and coordination without risking costly errors.
After simulation, the robots and tools moved into lab trials and applied real-world settings. Standard off-the-shelf tools proved inadequate for disassembly operations. To address this, researchers have firstly upgraded tools with higher torque, better locking systems and simplified geometry that enable the robot to manage modules not only safer, but also faster. Redesigned tools already proved their capabilities for a variety of operations: unscrewing, cutting cables, lifting modules or changing tools.
Cognitive agent
The latest advancements brought by UiA include a cognitive agent that connects a digital battery repository with the robotic platform. The repository acts as a knowledge library that stores connection maps, 3D models, disassembly rules and historical data from previous operations. This integration works both ways: the agent reads from the repository and updates it with new knowledge retrieved during dismantling. This way, the database improves over time. Access to this database allows the agent to adapt to three scenarios:
- Known structures: deterministic optimisation using genetic algorithms and Proximal Policy Optimisation [PPO] – allowing the system to find efficient dismantling sequences without getting stuck in poor strategies.
- Partial knowledge: behaviour trees for local recovery.
- Unknown structures: learning-based strategies trained in NVIDIA Isaac simulation.
Beyond planning, the agent translates plans into commands that can be executed by the robot, closing the gap between decision-making and action. It also learns from failure: for instance, when a tool slips or a path is blocked, the agent adjusts its strategy through reinforcement learning, improving performance over time.
The cognitive agent reduces planning time by up to 20% and improves resilience under uncertain situations. It is ready to communicate with the robotic cell during the next development stages which aim to automate 75% of the dismantling operations.
Future developments include additional visual inspection and CAD reconstruction to support second-life battery applications, along with other features: enhanced learning, handling new battery designs and other complex products and industrial scalability.
Researchers at the Faculty of Engineering and Science within the University of Agder [UiA] have developed a digital simulator along with an algorithm that automatically generates the Disassembly Process Plan [DPP] for batteries. The algorithm is built to select autonomously the most suitable machine to execute each disassembly operation, along with the corresponding toolkit. Beyond automating the DPP, this technological breakthrough promises to reduce the total disassembly process duration.
With the electrification of mobility, the upcoming wave of e-waste will be hard to deal with. In general terms, electrical waste is shredded in bulk before sorting and reprocessing. But lithium-ion batteries [LiBs], the types used in EVs, are inflammable and request careful handling. Moreover, shredding lots of different types of e-waste simultaneously inevitably results in contamination. Separating components before shredding would yield greater levels of purity, even allowing various components, such as cathodes, to be reused in their entirety. Dismantling batteries is a dangerous operation due to the risk of fire or explosion. Nonetheless, this process typically involves manual labour to remove the casing and separating the internal components – electrodes, electrolyte, cabling and separators.
Within the RHINOCEROS project, the UiA is responsible for developing an automated system for characterising battery state, discharging via the grid and dismantling for reuse or recycling. Their ultimate goal is to reduce the operational duration and to improve resource utilisation. An important phase of their work lies in the development of a Disassembly Process Plan – shortly DPP, which features a disassembly sequence plan [DSP] and an algorithm that can establish autonomously the most suitable equipment for each disassembly operation. To avoid several rounds of unsuccessful trials, researchers have firstly created a digital simulator where they already tested the algorithm generating the DPP.
Trained to use time and resources efficiently
The use of a simulation environment offers a safe and cost-effective way for researchers to test and refine the algorithm in a controlled context. Beyond safety and resource optimisation, simulators facilitate also scalability and reproducibility. The algorithm is trained to select the most suitable toolkit and calculate optimal tool change sequences, which reduces the overall disassembly process duration. Moreover, it also features integrated data that allow it to verify beforehand compatibilities between requested tools and machine capabilities. By determining optimal disassembly sequences and tool allocation, the DPP reduces operational costs through more efficient equipment usage.
Closer look at the technical specifications of the DPP developed in RHINOCEROS
From a technical point of view, the digital simulator, built on a foundation of Python and NumPy, tracks job progress, machine availability, tool states and temporal dependencies. Researchers applied various Reinforcement Learning (RL) algorithms, including Proximal Policy Optimisation (PPO), Policy Gradient (PG), Advantage Actor-Critic (A2C) and Asynchronous Advantage Actor-Critic (A3C), to solve the Job Shop Scheduling Problem (JSSP). The PPO algorithm, in particular, has demonstrated superior performance compared to other algorithms and state-of-the-art (SoA) solutions. The simulator is using datasets similar to the battery disassembling problem, mimicking real use case scenarios.
In a recent development, researchers have introduced an innovative approach called QTM (Q-learning with Tsetlin Machines) to improve scheduling algorithms. This new method combines the pattern recognition abilities of Tsetlin Machines (TM) with the decision-making strengths of Q-learning. The QTM approach uses a sophisticated reward system to balance the completion of tasks, minimize the time taken, and optimise the overall schedule. The TM component excels at identifying patterns in scheduling scenarios by analysing key features of jobs and operations. Meanwhile, the Q-learning framework provides a foundation for learning through a process of trial and error, gradually improving decisions over time.
The DPP developed in the RHINOCEROS project features PPO, QTM and classic deep Q-learning.
Impact on the real-world industrial applications
The DPP brings significant implications for real-world applications, particularly in industries that prioritise efficiency and sustainability. In EV battery recycling, it optimises the disassembly sequence, enhancing efficiency. It is also applicable to electronics WEEE recycling, where complex assemblies require precise disassembly. The DPP can integrate into large industrial scales, enabling the reuse of valuable components and supporting circular business models.
Automation integrators and robotic system developers benefit from the DPP’s computational framework, which models tool-changing operations and associated costs, optimising robotic movements and tool selection. Academic institutions can use the DPP to study broader questions in automated planning and robotic intelligence, providing a well-defined problem structure for testing new algorithms and heuristics.
For industrial research labs, the DPP offers a framework to develop specialised applications across different product categories, evaluate alternative product designs for end-of-life processing efficiency and simulate different disassembly strategies before physical implementation, reducing development costs and accelerating innovation cycles in recycling technologies.
Future developments for the Disassembly Process Plan
Plans for the DPP foresee its integration into a comprehensive digital twin of the manufacturing environment. Before its demonstration in a real-world setup, this digital twin operating with configurable tool capabilities and interdependent job sequences, will have to pass thorough testing in a simulated environment.
© Visual: University of Agder [UiA]
Researchers at University of Agder (UiA) are working on the automated sorting and dismantling of lithium-ion batteries (LIBs) that facilitates their reuse for second life applications.
During the first reporting period, UiA designed a simulator within a virtual environment, which allowed researchers to collect necessary data and parameters, and additionally identify potential bottlenecks that may occur in the actual disassembly process. Beyond collecting data without any physical experiment, the simulation environment brings the benefit of being cost- and time-efficient, allowing for safe and flexible robotic programming without disrupting the production.
According to the simulation environment that covers the entire disassembly process, from automated discharging to sorting, the entire process can run with a total duration spanning between 12 and 14 minutes. The detailed results of this activity will soon be publicly available in a new scientific paper titled addressing the evaluation of deep reinforcement learning for job shop problems.
During the past six months, UiA researchers have constructed a virtual simulator to train the Machine Learning (ML) algorithms. Deep learning methods have already been applied for the Job Shop problem for finding the optimal disassembly sequence when the dependence matrix is known. Next development steps will entail training the algorithms to enable automatic disassembly of Electric Vehicle (EV) batteries without prior knowledge, while optimising procedures and enhancing safety.
© AdobeStock Photos
Benefits of “offline programming”
Simulation environments have been widely used in robotics for demonstration and planning purposes. This typically takes place within a simulation software or any other platform that can replicate the robot’s dynamics, workspace and surrounding environment, and enable robotic programming. This replication system has proved to be cost- and time-efficient due to a series of advantages: no risk of disrupting the production by removing the robot from the production line, high flexibility allowing infinite number of configurations on a virtual model of the robot, reduced risk of equipment damage due to high predictability of malfunctions. For instance, operational industrial robots can be tested in a simulation environment before deployment. This process is often referred to as “offline programming”.
Researchers at Department of Engineering Sciences, University of Agder have been designing a simulator within a virtual environment to visualise and test various demanufacturing approaches for battery packs, allowing them to collect necessary data such as process duration, disassembly tools – all without the need of physical experiments. This innovative exploration not only streamlines data gathering but can also help identify and remove unforeseen bottlenecks in the disassembly process.
Environment configuration and use case application for battery pack demanufacturing
Using a simulation environment, known for its high-fidelity graphical capabilities, researchers at UiA were able to create a controlled virtual space ideal for visualising complex robotic processes and interactions related to demanufacturing electric vehicle (EV) batteries. The robotic cell design is decomposed across all the subtasks/segments of the disassembly process, with specific consideration to safety aspects and optimised efficiency and accessibility of robotic manipulators.
In order to study in depth and to demonstrate the efficacy of a proposed fully automated demanufacturing line, researchers at UiA meticulously recreated a virtual environment where they simulated the disassembly of a an EV battery pack. This simulation encompasses the entire process from automated discharging to the disassembly of packs into modules, subsequent characterisation, sorting, and finally, the disassembly of modules into individual cells. All elements of the simulation are animated using the simulation platform and a robotic operating system code, providing a holistic view of the potential automation within the demanufacturing process.
For this particular use case, researchers at UiA have calculated the time individually for each disassembly operation, reaching roughly between 12 and 14 minutes for the entire process.
The findings of this research that replicated the complete demanufacturing of EV LiB pack in a virtual, yet realistic industrial setting, illustrate the leverage of automated processes over conventional approaches conventionally relying on manual techniques. The simulation provides estimates for operation time for a given disassembly procedure (disassembly sequence and disassembly process). Upcoming steps will involve AI to generate and optimise the procedures. Additionally, the simulation can identify solutions to minimise human exposure to potential hazards associated with battery disassembly processes. Future in depth and multidisciplinary research is required to optimise the disassembly sequences and process in the simulated environment by training reinforcement learning agents and including a collision avoidance system, to name a few.
Ultimately, the aim of this research is to anticipate the increasing number of EV batteries that will be decommissioned soon, and to ensure a proper management of waste, while recovering all the resources available in clean mobility technologies.
Discover UiA’s previous activities
© Photo: Adobe