News
Automated battery dismantling: a 3-year journey from concept to lab testing
11/05/2026
The automated battery dismantling activities set out years ago with a concept idea and information about manual disassembly operations. But manual dismantling of end-of-life [EoL] electric vehicle [EV] batteries takes time, requires skilled labour and exposes workers to high voltage, residual energy and mechanical risks. To address these concerns, Watt4Ever [W4E] and University of Agder [UiA] proposed the automation solution. It solves challenges referring to efficiency and safety, but it also uncovers its limits when dealing with the high variability of battery pack designs. To handle this variation, the RHINOCEROS project is testing flexible, sensor–based robotic systems that can sort and dismantle different battery packs, even when there are uncertainties about their internal structure.
From this concept phase, it has gradually evolved, regularly reporting updates. It began from the development of a Disassembly Process Plan (DPP) supported by digital simulators and cognitive agents linked to a digital battery repository. This was followed by several rounds of engineering upgrades and the integration of these developments into a robotic dismantling system. The robots already moved into lab trials, under real-world settings. The automated dismantling operations were presented within our last newsletter.
The robotic system
The robotic system includes a set of features for automated sorting and dismantling of EoL EV batteries: two industrial robots, sensing, modified tools, control architecture, integrated execution and a process to compare its performance with manual dismantling operations. In these trials, the system is tested against two targets:
- it must sort the battery modules within a 120 minute window across different pack designs
- it must remove at least 75% of the pack to module connections on a minimum of five battery types
The robotic system is designed to work in close interaction with the cognitive agent and the database presented in the previous reporting. The cognitive agent determines the order of operations; the robotic system executes them. As it works, every action is logged and sent back to the digital repository, which helps refine the dismantling steps within the RHINOCEROS project.
What had to be rebuilt
Several tools needed mechanical and control upgrades once the lab tests started.
Unscrewing tool
Early tests showed that engaging the bit on screw heads was hampered when encountering misalignment problems. The tool now includes a screw‑retention feature and a controlled shift between search and high‑torque removal. It can run repeated cycles without losing position.
© University of Agder
Cable disconnection tool
The first prototype struggled with misaligned connectors. The refined version uses one actuator for two actions: releasing connectors or cutting cables when they cannot be unplugged. This simplification removes the need for manual tool changes and gives a predictable fallback option.
Module lifter
The first lifter did not cope well with modules supported only on one side. The redesigned version reinforces both side supports, reduces overhang and improves the pneumatic layout. It now combines top vacuum lifting with side clamping, which increases stability when handling modules with uneven heights.
Across the test batteries, the system has carried out 24 distinct actions, including removing covers, disconnecting cables, cutting brackets, lifting modules and switching tools.

© University of Agder
Tests confirm that 75% dismantling operations can be automated
The team compared manual dismantling times and steps with what the robots managed to complete. Results show that the system can now perform about 75% of the dismantling sequence without human intervention. The method used to measure groups actions into families: cover removal, structural parts, screws, cables, cutting, lifting and tool changes. This approach enables researchers to assess different battery designs on equal terms in the future.
Based on the validated operation sequences and time baselines, the automated disassembly system meets the KPI target of at least 75% automated disassembly time on the tested battery types evaluated so far. Final validation will be completed after the remaining test campaigns and integrated demonstrations before M48.
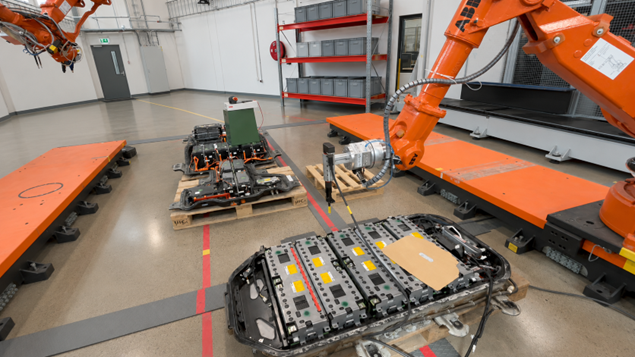
Dual-robot demonstration ready for testing in near-industrial environment
The demonstration operations will use UiA’s dual robot setup, where each robot, equipped with sensors to support contact-aware handling and safer execution on variable battery geometries, performs distinct sequences of the process.
The full cycle starts with high-quality photos of the battery pack. The robots then select the correct tool, remove screws, switch tools, lift the two modules detected by the camera and place them in the sorting bin. The tool changing station enables automatic switching between end-effectors so one robot can execute multiple dismantling tasks in one continuous sequence. In the RHINOCEROS process chain, it is the enabling operation between perception-guided targeting and tool-specific actions such as unscrewing, cable disconnection, and module lifting.
Drivers in ROS2 are ready and dismantling actions are already in place. The final validation campaign will run once the remaining two batteries arrive, with the results expected during the last project stage.
© Photos: University of Agder